MENU
ホーム
IMU
IMU
– category –
IMU
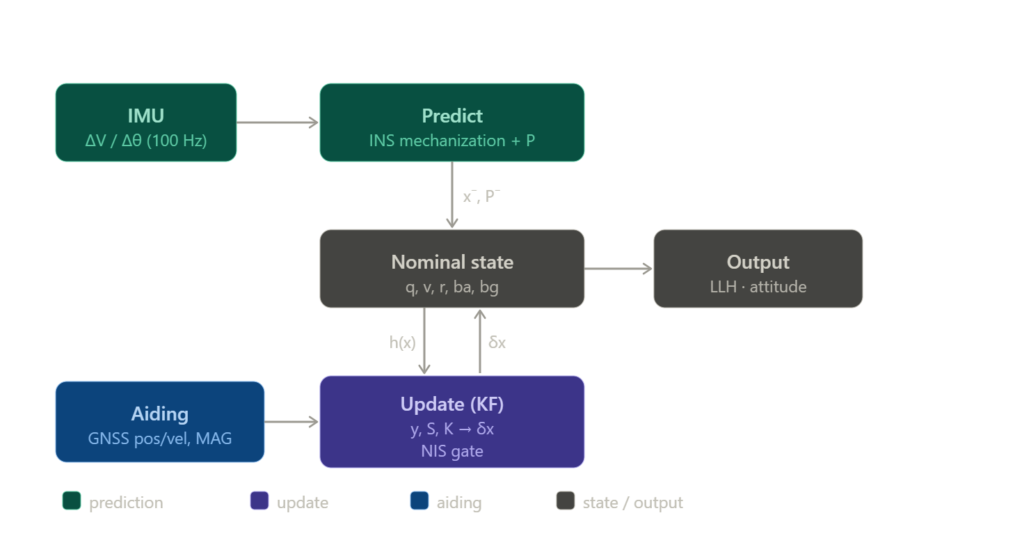
GNSS/IMU(Loosely Coupling)をつくる — Part1:構想設計
このシリーズの目標 このシリーズで作るのは、次のようなシステムです。 - GNSSとIMUを、ルーズカップリング構成のカルマンフィルタで統合し、 - 位置・速度・姿勢を出力する。 GNSS単独では更新レートが低く(数Hz)、トンネルや市街地で途絶します。一方...
20/06/2026
1
閉じる